Abstract:
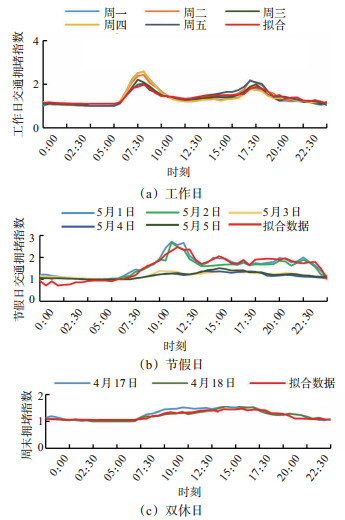
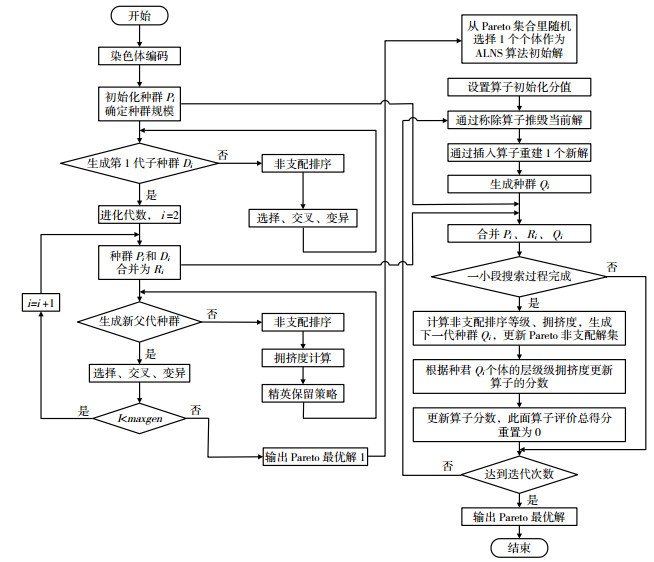
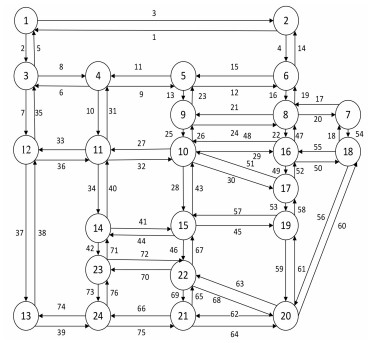
Considering increasing traffic congestion in urban areas, routing problem of vehicles serving the cold chain logistics is modeled as an optimization problem with multiple objectives (namely delivery cost and satisfaction of customers and deliverymen), which is expected to provide solutions to the punctuality and satisfaction issues within the cold chain logistics industry. Traffic data on weekdays, holidays, and weekends are collected, the temporal distribution of the congestion is studied, and a model for estimating travel time among different nodes within road network is also developed. A gray-whitening weight function is used to evaluate the satisfaction of deliverymen by considering workload and salary. A multi-objective vehicle routing problem is modeled with the following constraints, including stochastic demand, customer satisfaction, time windows, and others. An improved adaptive large neighborhood search (IALNS) algorithm is proposed, which balances the searching scale and computational time of the non-dominated sorted genetic algorithm-II (NSGA-II). The results of the proposed method in the classical Sioux-Falls transportation network are shown as follows: ①When the deliveryman's satisfaction is considered, the total cost of delivery on working days, holidays, and weekends increases by 2.05%, 1.93%, and 1.16%; the deliveryman's satisfaction increases by 39.43%, 46.26%, and 57.37%; the average customer satisfaction increases by 1.16%, 4.76%, and 9.75%; and the transportation time decreases by 2.42%, 7.34%, and 8.41%, respectively. ② When the total cost is set as the main objective andthe standard deviations of customer demand are set as 1, 2, 3, 4, and 5, the shortage cost increases by 0.79%, 0.89%, 0.93%, 0.94%, and 0.95%, respectively, compared with the case without considering the stochastic demand. Study results show that the stochastic demand from the customers has an impact on distribution costs. In conclusion, the proposed model and algorithm can provide a new methods for improving satisfaction of deliverymen and customers of cold chain logistics industry.