

Improved AIMM-UKF Mobile Target Tracking Algorithm Based on Airport Map Information
-
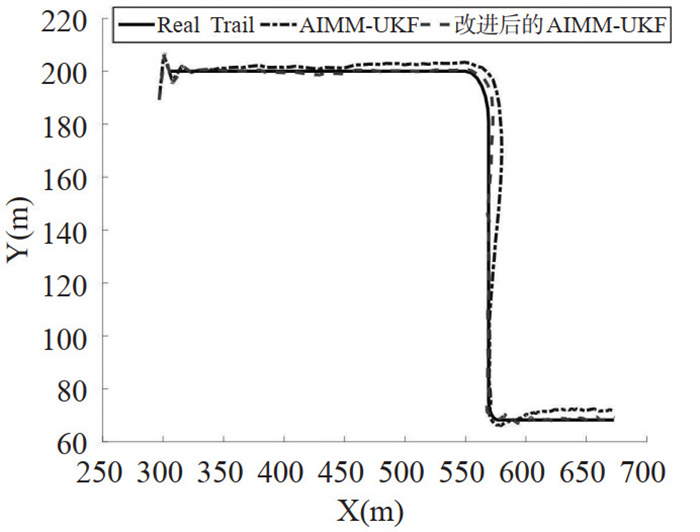
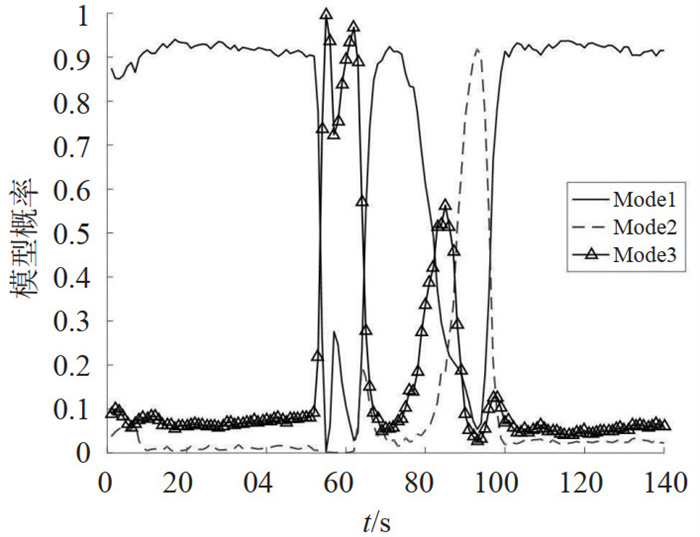
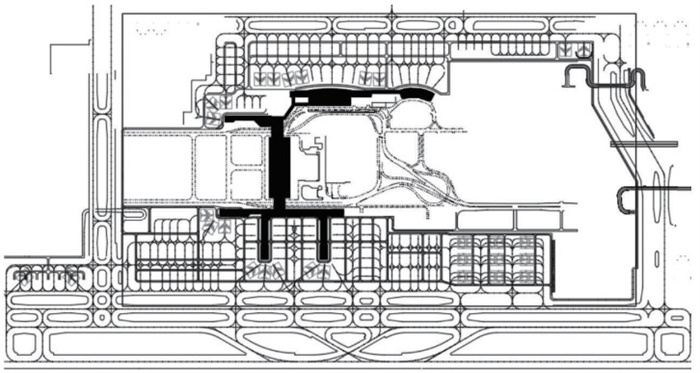
摘要: 针对机场场面高密度交通以及多类型移动目标的特殊性,为保证机场自动化设备如无人驾驶技术在机场内的应用,需要进一步优化定位算法来提高移动目标的跟踪精度;通过分析现有的自适应交互式多模型- 无迹卡尔曼滤波跟踪算法(adaptive interactive multi-model-unscented Kalman filter algorithm,AIMM-UKF)在移动目标跟踪过程中模型匹配度和跟踪精度上的不足,研究了1种基于机场活动地图信息改进的自适应交互式多模型-无迹卡尔曼滤波跟踪算法。根据机场地图数据库(airport map database,AMDB)细化的机场操作规程文件,通过ArcGIS软件对某机场施工CAD图简化处理并利用二次多项式配准法对机场地图进行精确校正,完成高精度机场地图修正,将接收到的机场智能监控设备采集到的数据进行实时处理,结合高精度机场地图信息对发生位置偏移的移动目标的坐标信息进行修正,改变移动目标跟踪算法的观测值,在自适应修正马尔可夫转移概率矩阵的基础上,利用观测矩阵对其进行二次修正,提高移动目标跟踪精度和模型匹配度。经蒙特卡洛仿真实验表明:该改进算法利用高精度机场地图信息对移动目标的观测值进行修正,与自适应修正马尔可夫转移概率矩阵的交互式多模型-无迹卡尔曼滤波算法相比,位置的均方根误差(root mean square error,RMSE)平均降低了62.69%,速度的RMSE平均降低了56.84%。本文算法具有更高的模型匹配度和更佳的滤波效果,提高了场面移动目标的跟踪精度。Abstract: Given the unique challenges posed by high-density traffic flow and diverse moving targets on airport surfaces, ensuring accurate tracking is essential for effective operation of airport automated equipment such as unmanned vehicles within airports. To address the limitations of the existing Adaptive Interactive Multi-Model-Unscented Kalman Filter algorithm (AIMM-UKF) in tracking moving targets in airport movement areas, an enhanced tracking algorithm is proposed by incorporating high precision airport map information into AIMM-UKF to improve tracking accuracy. Using the detailed airport operating procedures file from the airport map database (AMDB), the construction CAD drawing of an airport is simplified and accurately corrected with ArcGIS software and the second-order polynomial registration method to complete the high-precision airport map correction. The data collected by airport intelligent monitoring equipment is processed in real time, with the coordinate information of moving targets being corrected using the high-precision airport map information. This correction adjusts the observation values in the moving target tracking algorithm. Additionally, by incorporating adaptive correction of the Markov transition probability matrix and applying the observation matrix for secondary correction, tracking accuracy and model matching are improved. Monte Carlo simulation experiments have demonstrate that this improved algorithm utilizes high-precision airport map information to refine the observation values of moving targets. Compared with the Adaptive Correction Markov Transition Probability Matrix Interactive Multiple Model-Unscented Kalman Filter algorithm, this improved algorithm achieves an average reduction of 62.69% in the root mean square error (RMSE) of position and 56.84% in the RMSE of speed. In comparison, this algorithm exhibits superior model matching and superior filtering performance, significantly enhancing the tracking accuracy of moving targets within airport environments.
-
[1] 刘婉铃. 数字化技术在智慧机场中的运用分析[J]. 网络安全和信息化, 2023(10): 24-26.LIU W L. Analysis of the use of digital technology in smart airport[J]. Security and Informatization, 2023(10): 24-26. (in Chinese) [2] 王冰峰, 刘雯. 智能驾驶系统、无人驾驶设备在智慧机场的应用前景分析[J]. 民航管理, 2023(3): 54-57.WANG B F, LIU W. Analysis of the application prospect of intelligent driving system and unmanned equipment in smart airport[J]. Civil aviation management, 2023(3): 54-57. (in Chinese) [3] ZHENGCAI Y, YUNZHONG H, YOUBING Z. Path-Planning strategy for lane changing based on adaptive-grid risk-fields of autonomous vehicles[J]. World Electric Vehicle Journal, 2022, 13(10): 175-175. doi: 10.3390/wevj13100175 [4] 张凤, 汤晓鹏, 刘兵飞. 机场飞行区无人驾驶清水车优化调度方法[J]. 交通信息与安全, 2022, 40(2): 82-90.ZHANG F, TANG X P, LIU B F. An optimization method for scheduling autonomous potable water service vehicles at airfields[J]. Journal of Transport Information and Safety, 2022, 40(2): 82-90. [5] HUANG Y L, ZHANG Y G, XU B, et al. A new adaptive extended Kalman filter for cooperative localization[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(1): 353-368. doi: 10.1109/TAES.2017.2756763 [6] HUANG Y L, ZHANG Y G, WU Z M, et al. A novel adaptive Kalman filter with inaccurate process and measurement noise covariance matrices[J]. IEEE Transactions on Automatic Control, 2018, 63(2): 594-601. doi: 10.1109/TAC.2017.2730480 [7] HUANG Y L, ZHU F C, JIA G L, et al. A slide window variational adaptive Kalman filter[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2020, 67(12): 3552-3556. doi: 10.1109/TCSII.2020.2995714 [8] HUANG Y L, ZHANG Y G, LI N, et al. A novel robust student's t-based Kalman filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3): 1545-1554. doi: 10.1109/TAES.2017.2651684 [9] XUE C, HUANG Y L, ZHAO C, et al. A Gaussian-Generalized-Inverse-Gaussian joint-distribution-based adaptive MSCKF for visual-inertial odometry navigation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(3): 2307-2328. doi: 10.1109/TAES.2022.3213787 [10] GONG L S, WANG H X, HUANG G S. Tracking moving target on airport surface based on variable-structure IMM algorithm[J]. Advanced Materials Research, 2012 1643: 459-459. [11] 徐义晗. 基于无迹卡尔曼滤波的移动目标跟踪算法[J]. 火力与指挥控制, 2020, 45(12): 149-152.XU Y H. Unscented KF-based mobile target tracking algorithm[J]. Fire Control and Command Control, 2020, 45(12): 149-152. (in Chinese) [12] 孙晓舟. 机动目标时变转移概率IMM跟踪算法[J]. 电子世界, 2017(15): 34-35, 39.SUN X Z. Time-varying transfer probability IMM tracking algorithm for maneuver targets[J]. Electronic World, 2017(15): 34-35, 39. (in Chinese) [13] 戴定成, 姚敏立, 蔡宗平, 等. 改进的马尔可夫参数自适应IMM算法[J]. 电子学报, 2017, 45(5): 1198-1205.DAI D C, YAO M L, CAI Z P, et al. Improved adaptive Markov IMM algorithm[J]. Acta Electronica Sinica, 2017, 45(5): 1198-1205. (in Chinese) [14] 许登荣, 程水英, 包守亮. 自适应转移概率交互式多模型跟踪算法[J]. 电子学报, 2017, 45(9): 2113-2120.XU D R, CHENG S Y, BAO S L. Interacting multiple model algorithm based on adaptive transition probability[J]. Acta Electronica Sinica, 2017, 45(9): 2113-2120. [15] 赵文杰, 汤新民, 黄忠涛, 等. 基于改进IMM算法的机场移动目标轨迹跟踪与预测[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44(3): 468-473, 479.ZHAO W J, TANG X M, HUANG Y Z, et al. Trajectory tracking and prediction of airport moving targets based on improved IMM algorithm[J]. Journal of Wuhan University of Technology(Transportation Science & Engineering), 2020, 44(3): 468-476, 479. (in Chinese) [16] 叶瑾, 许枫, 杨娟, 等. 1种改进的时变转移概率AIMM跟踪算法[J]. 应用声学, 2020, 39(2): 246-252.YE J, XU F, YANG J, et al. An improved AIMM tracking algorithm based on adaptive transition probability[J]. Journal of Applied Acoustics, 2020, 39(2): 246-252. (in Chinese) [17] 靖丹, 朱婧媛, 张超. 机场移动地图系统的技术研究[J]. 电子测试, 2020(3): 76-77.JING D, ZHU J Y, ZHANG C. Technical research on airport mobile map system[J]. Electronic Testing, 2020(3): 76-77. (in Chinese) [18] MITSEVICH L, ZHUKOVSKAYA N. Photogrammetric methods of terrain and obstacle data collection and AMDB creation based on satellite and UAS imagery[J]. MATEC Web of Conferences, 2018, 236, 01008. [19] 何国生. 基于GIS的机场图数据库(AMDB)应用及存在问题[J]. 中国民用航空, 2017(11): 16-19.HE G S. The application of GIS-based AMDB and the problems[J]. China Civil Aviation, 2017(11): 16-19. (in Chinese) [20] TIAN M, BO Y, CHEN Z, et al. Multi-target tracking method based on improved firefly algorithm optimized particle filter[J]. Neurocomputing, 2019, 359: 438-448 [21] SHUMAN G, SHICHANG W, ZHENZHONG Y, et al. A review of deep learning-based visual multi-object tracking algorithms for autonomous driving[J]. Applied Sciences, 2022, 12(21): 10741. [22] 王平波, 刘杨. 基于改进自适应IMM-UKF算法的水下目标跟踪[J]. 电子与信息学报, 2022, 44(6): 1999-2005.WANG P B, LIU Y. Underwater target tracking algorithm based on improved adaptive IMM-UKF[J]. Journal of Electronics and Information Technology, 2022, 44(6): 1999-2005. (in Chinese) [23] YING Z, CHUNYU L, TINGSONG Z. Quantitative of atomic spectra by laser-induced teaching integrating multitarget tracking algorithm[J]. Mobile Information Systems, 2022, 9(14): 1203561. [24] CHANGRUI L, QIUPING P. Multitarget tracking algorithm in intelligent analysis of football movement training stance[J]. Security and Communication Network, 2022, 8(4): 6579066. -

 下载:
下载:






 点击查看大图
点击查看大图
图(10) / 表(1)
计量
- 文章访问数: 127
- HTML全文浏览量: 76
- PDF下载量: 0
- 被引次数: 0